意义所在
每过一段时间,我就会开始思考:我,我们,至今为止做的这么多事,到底是为了什么。如是过了这么久,那一定会有个意义 […]
每过一段时间,我就会开始思考:我,我们,至今为止做的这么多事,到底是为了什么。如是过了这么久,那一定会有个意义 […]
现状 工业设计系目前有两个专业:工业设计与艺术设计。两个专业的主要课程重合,又有些不同。虽然是针对工业设计专业 […]
在21岁的时候,我为生命谜题深陷。偶然看到了TVB的电视剧《天与地》,我的疑问慢慢解开。 每个人的21年都值得 […]
有时我觉得需要理想成就,但其实我只是需要陪伴。朋友,请将我记起。
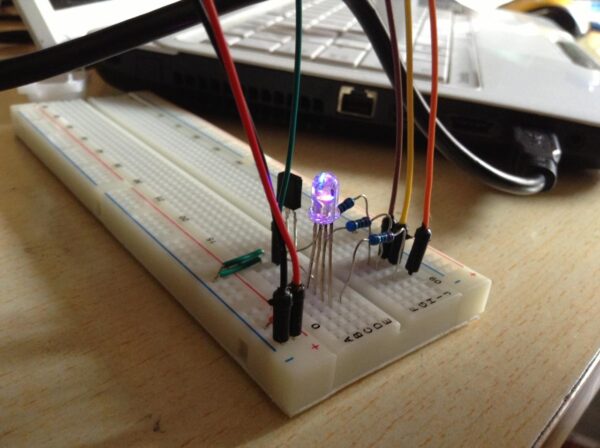
今天做了一个为自行车测速的传感器。原理很明了:在自行车轮圈上均布贴上黑色贴条,而轮圈接近白色,转动时灰度传感器 […]
这一篇,写给另一位挚友。纪念年轻的勇气,无知无畏。 记得初次见面,我就感觉到,我们应当是同样的人。怀着对世界的 […]
在网络上普遍存在的Arduino与Processing互动的例子,都具有一个很简单的构造:Arduino上用S […]
课程作业总是没完没了。有时候不得不日复一日地做同样的事情,虽然明明知道不久就会全忘掉。 早晨起来就开始琢磨这次 […]
在大学里,我接触到了两个和机器人有关的地方:学生组建的机器人俱乐部,学校组织的机器人实验室。 这是两个不同群体 […]